
Introduction
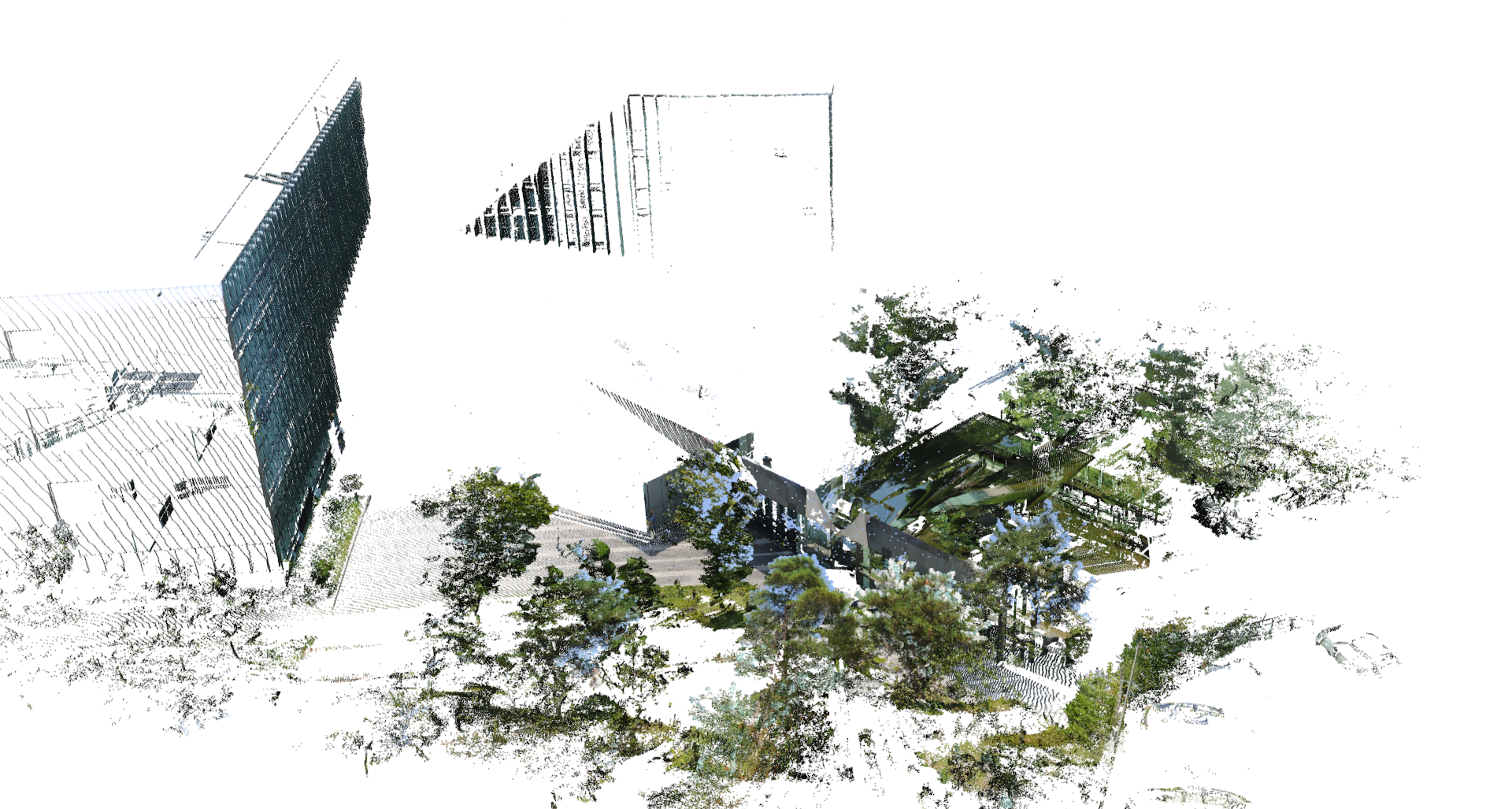
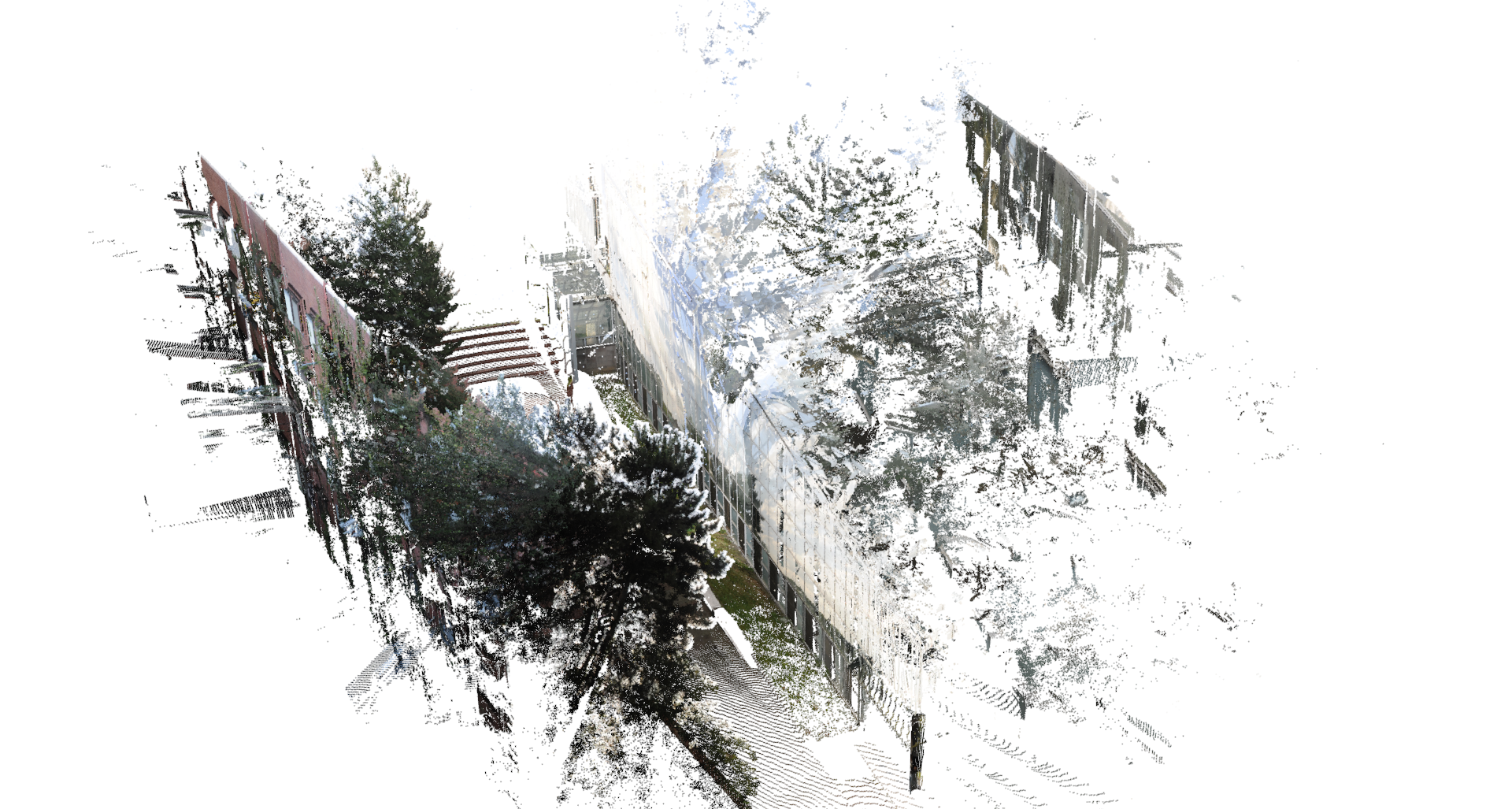
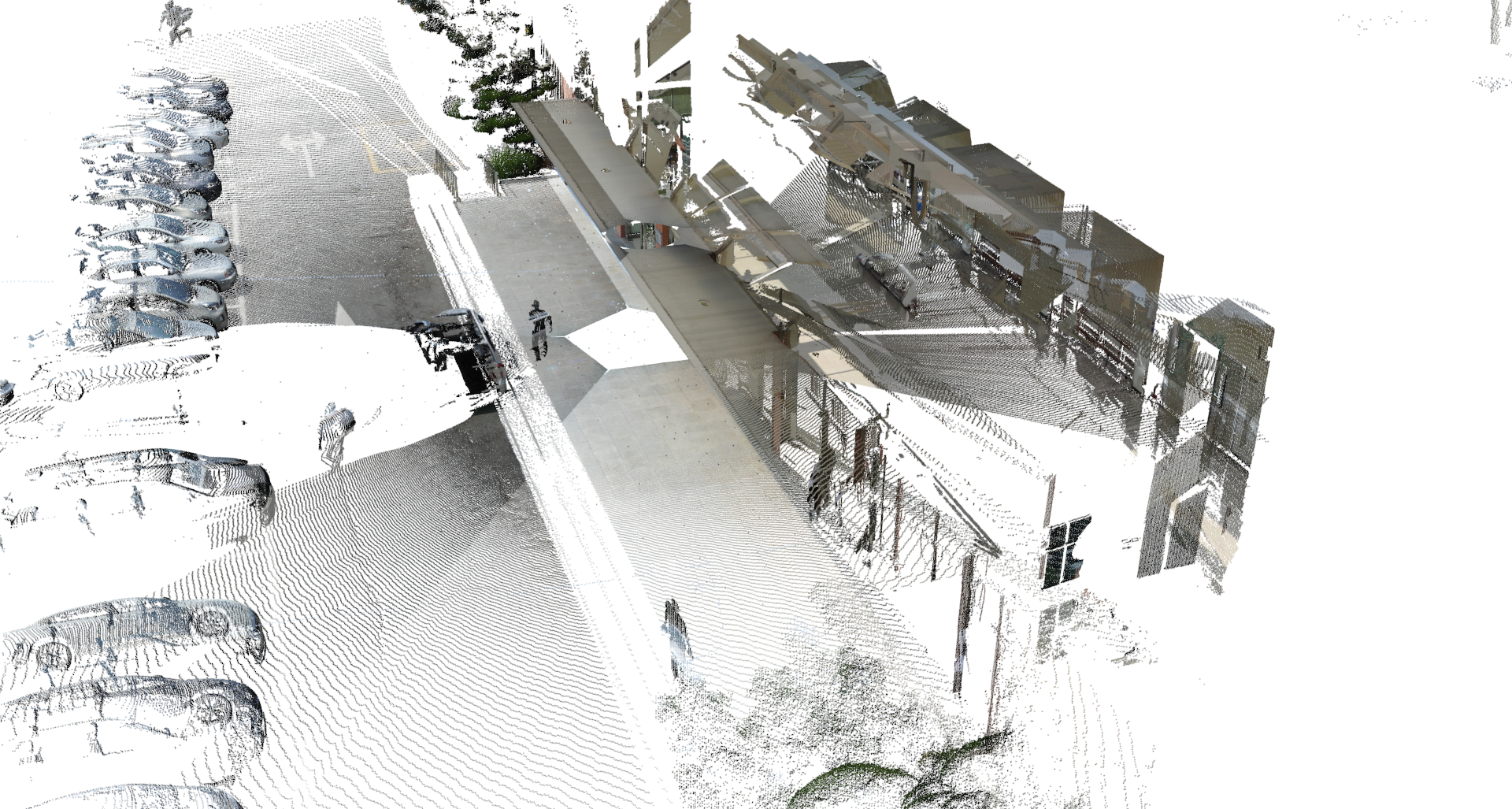
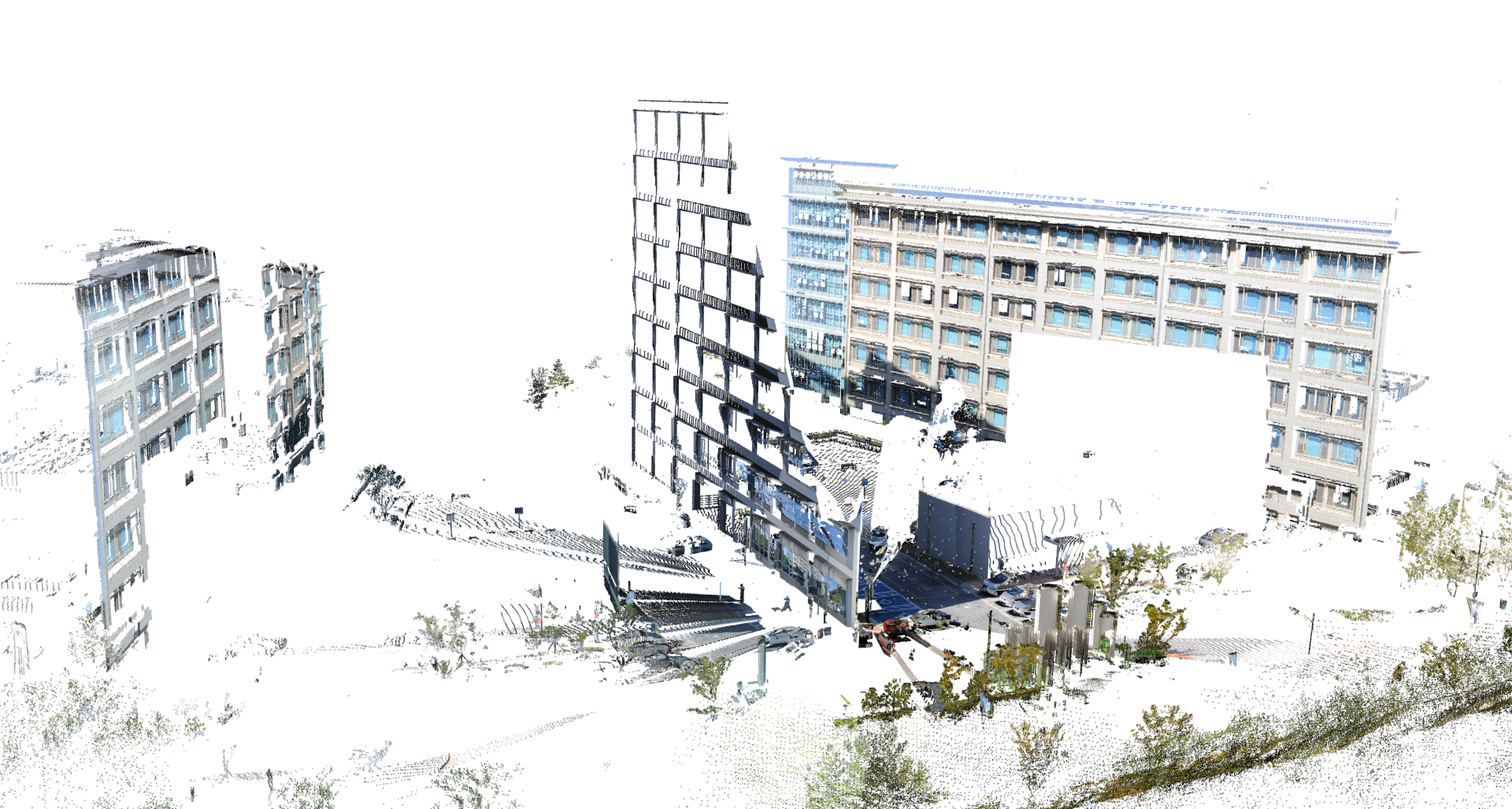
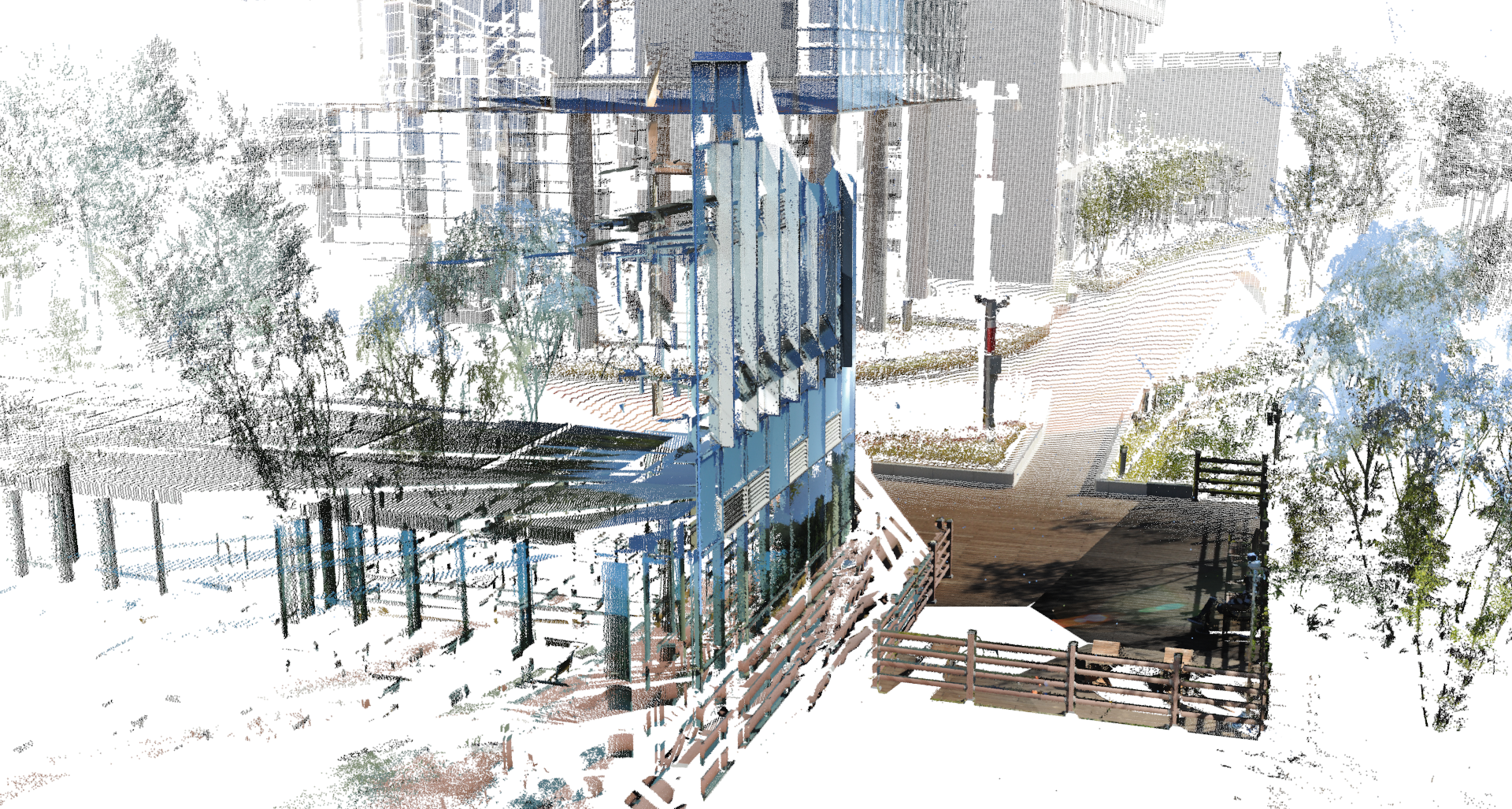
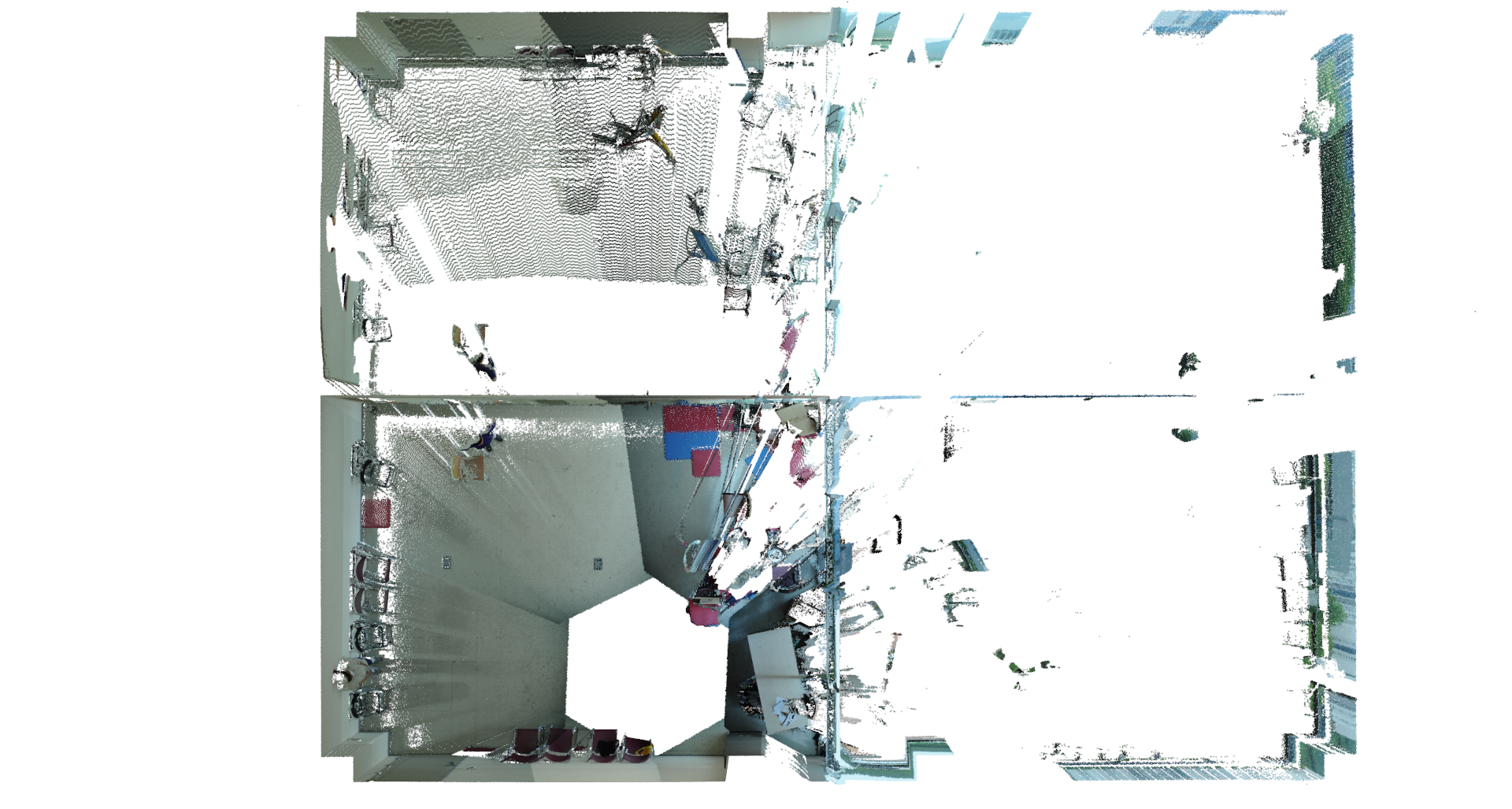
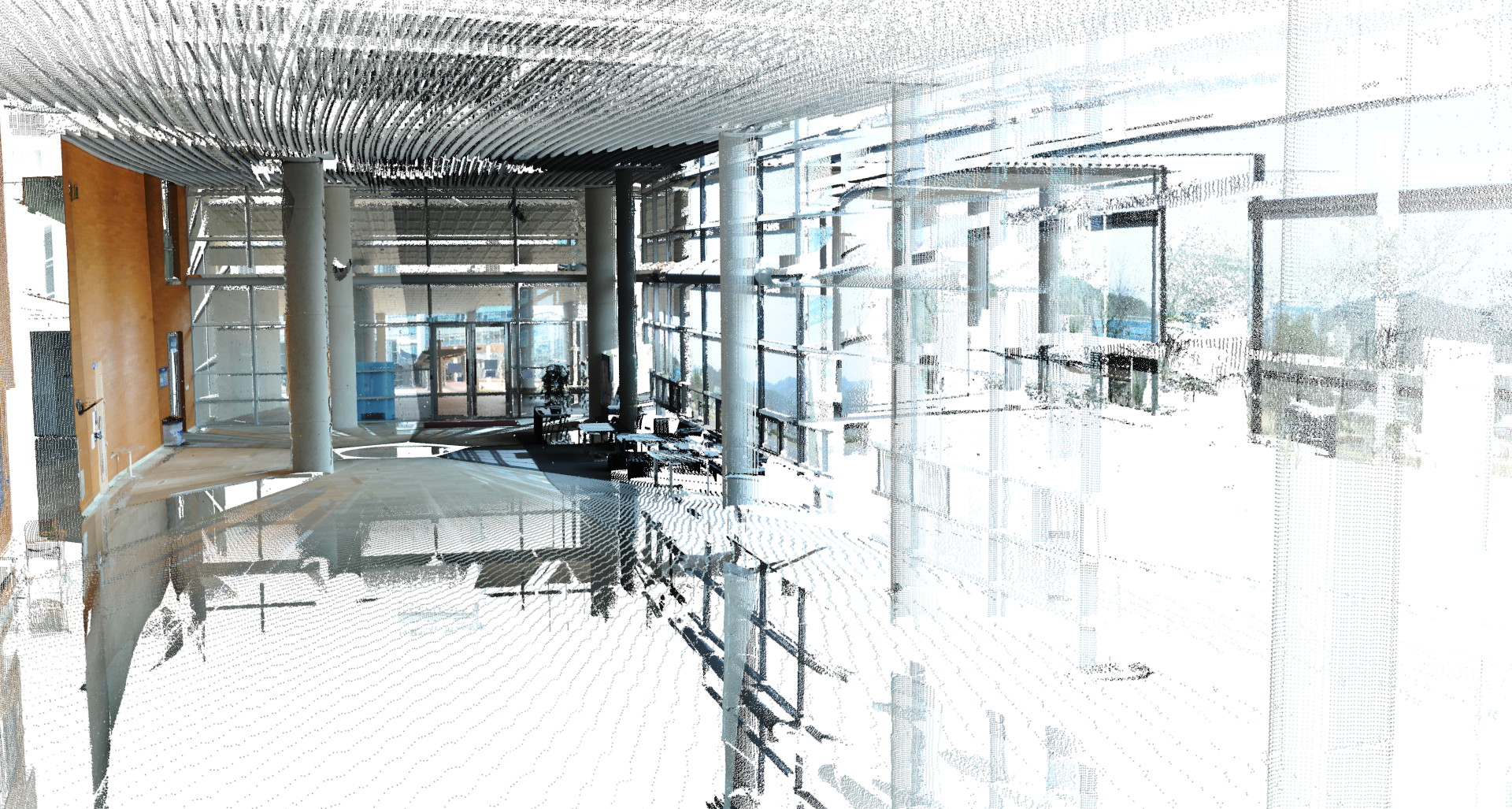
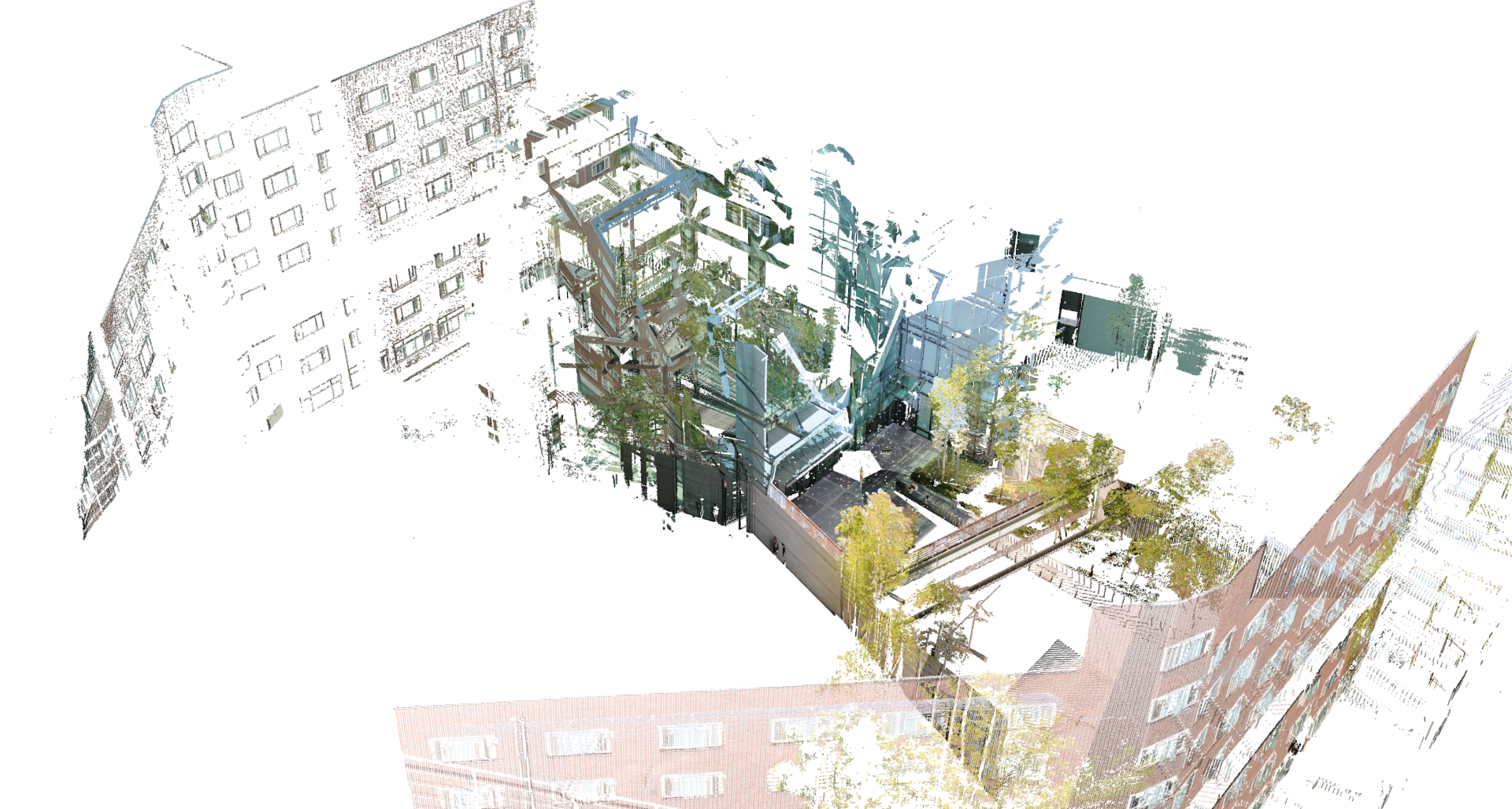
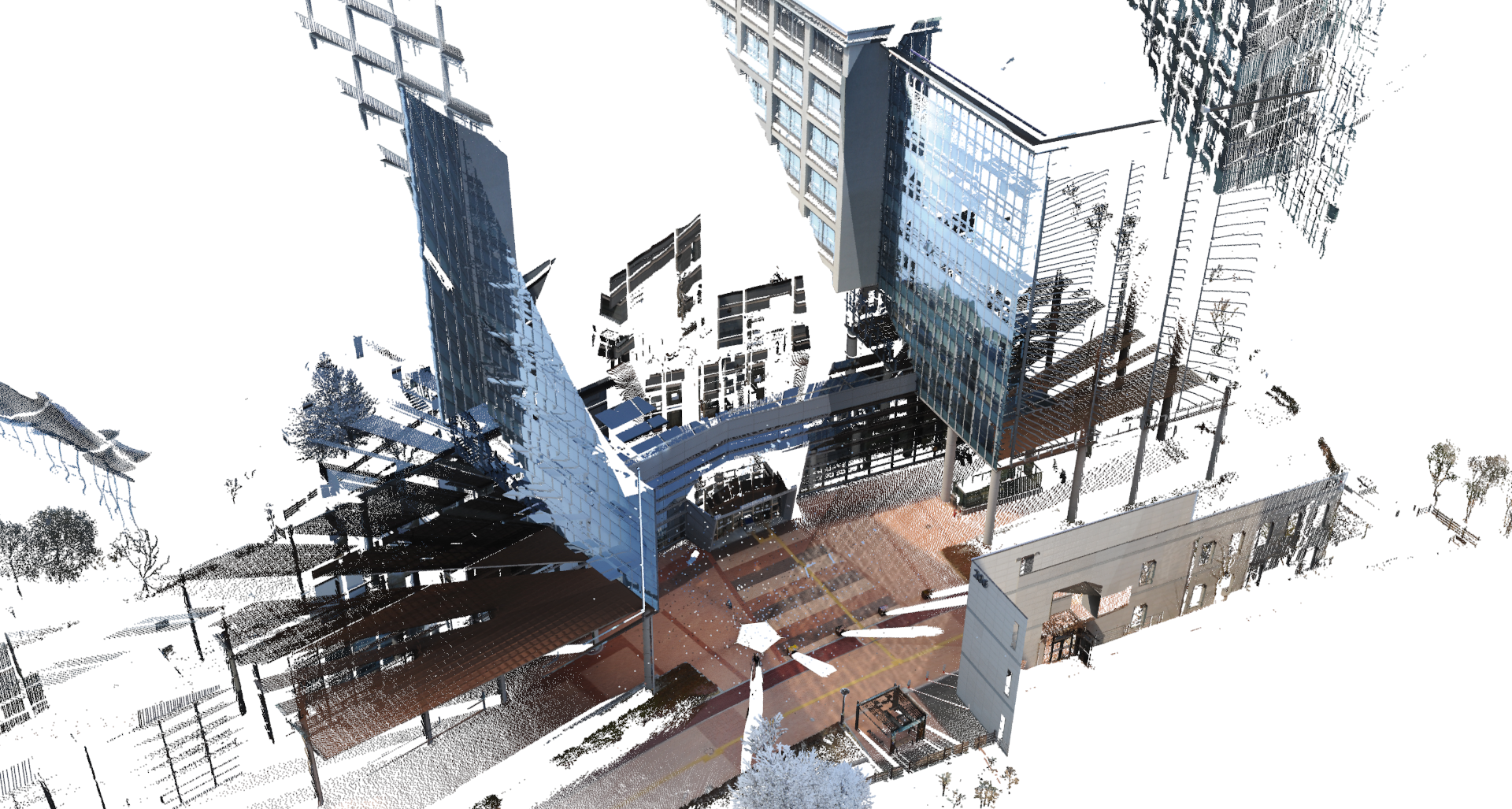
The UNIST Large-Scale 3D Point Clouds (LS3DPC) dataset for virtual point removal consists of 11 large-scale point clouds containing several millions of points with XYZ cartesian coordinates and RGB colors. This UNIST LS3DPC dataset is captured by RIEGL VZ-400 terrestrial LiDAR scanner and Nikon D700 digital camera concurrently. The XYZ cartesian coordinates are measured in meters. You can easily read the point clouds from PCD files using PCL library or pcread function from Matlab.
Large-Scale 3D Point Clouds Examples
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Related Publications
All publications using the dataset or any of the derived dataset should cite the following paper:
Jae-Seong Yun, and Jae-Young Sim, “Virtual point removal for large-scale 3D point clouds with multiple glass planes,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 43, no. 2, pp. 729-744, Feb. 2021. [bibtex]
Terms of Use
Descriptions
The UNIST LS3DPC dataset is the property of the Visual Information Processing (VIP) Lab. at the Ulsan National Institute of Science and Technology, Rep. of Korea. This UNIST LS3DPC dataset is released to public for academic research only and is free to researchers from educational or research institute for non-commercial purposes. Please read and sign your agreement to the following terms and conditions to get access to this dataset. By downloading the dataset, you accept these Terms of Use, and agree to be bound by its provisions.
Please read these Terms of Use carefully before using the dataset organized by VIP Lab., UNIST. Your access to and use of the dataset is conditioned on your acceptance of and compliance with these Terms. These Terms apply to all uses and others who access or use the dataset. By accessing or using the dataset you agree to be bound by these Terms. If you disagree with any part of the terms, then you may not access the dataset.
Licenses
The use of this dataset is governed by the following terms and conditions. Without the expressed permission of the VIP Lab., any of the following will be considered illegal: redistribution, modification, and commercial usage of any of the dataset in any way or form, either partially or in its entirety. For the sake of privacy, images of all subjects in any of the dataset are only allowed for the demonstration in academic publications and presentations. All users of the UNIST LS3DPC dataset agree to indemnify, defend and hold harmless, the VIP Lab. and its officers, employees, and agents, individually and collectively, from any and all losses, expenses, and damages.
New Addition: Labeled Version of UNIST LS3DPC Dataset
We are pleased to announce that a labeled version of the UNIST LS3DPC dataset is now available. In addition to the original large-scale point clouds, the new dataset includes semantic annotations for each point, enabling research on tasks such as semantic segmentation and scene understanding. As with the original dataset, this labeled version is provided for academic research purposes only and is subject to the same Terms of Use outlined above.
Acknowledgements
This work was supported by the National Research Foundation of Korea (NRF) within the Ministry of Science and ICT (MSIT) under Grant 2017R1A2B4011970.